团队简介:团队面向国家战略需求和广西丘陵山区农业机械化的发展需求,在甘蔗全程生产机械、木薯收获机械和水稻种植机械等方面,运用先进的设计理论和方法,开展科学研究,解决了一系列关键技术和基础性理论难题,并自主研制了立式超深旋耕(粉垄)机、甘蔗种植机、木薯收获机和水稻直播机等样机。共主持科研项目40项,其中,国家基金6项,省部级项目25项。发表SCI、EI论文42篇,获发明专利授权21项。
学术带头人:杨望,工学博士,教授,中国农业大学访问学者(导师:李洪文教授)。现为中国农业工程学会教育委员会委员,中国农业机械学会丘陵山区农林机械分会委员,中国农业机械学会青年工作委员会委员,中国热带作物学会机械专业委员会委员,热带亚热带作物机械化创新联盟理事。主要从事立式超深旋耕(粉垄)、甘蔗、木薯、水稻亚热带智能农机装备和农业机器人研发。主持和主要参加科研项目21项,其中,主持国家自然科学基金项目2项,首个广西农机国际合作重大专项1项,省级项目5项,参加国家自然科学基金项目2项。第一/通讯作者发表SCI/EI论文25篇。获得省级鉴定成果1项,获得发明专利6项,实用新型专利5项。
联系电话:13557210593
主要成员:黄亦其(博士,副教授)
陆静平(博士,副教授)
陆志恒(博士,助理教授)
张彪(博士,助理教授)
郑贤(硕士,工程师)
潘明章(博士,教授)
研究方向:
1、甘蔗全程生产机械
(1)立式超深旋耕(粉垄)机械
针对目前立式超深旋耕,土壤的破碎程度在高度方向分布不合理,土块呈上大、下小分布,且作业功耗大,机械振动大的主要问题,团队与广西五丰从2015年开始合作,开创性对立式超深旋耕刀具进行了一系列的减阻优化研究,发表了国际首篇立式超深旋耕机的英文论文,全面详细阐明了立式超深旋耕刀具作业机理,为刀具的优化奠定了关键的基础。相关研究获得国家自然科学基金项目和广西自然基金项目连续支持。

立式超深旋耕机(2021)
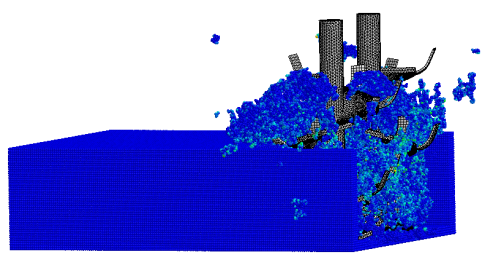
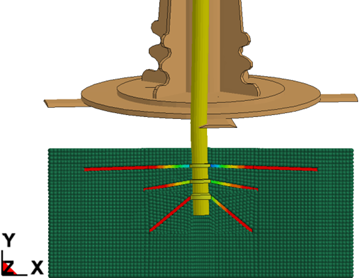
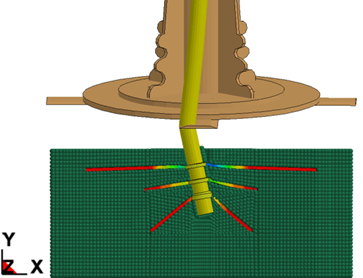
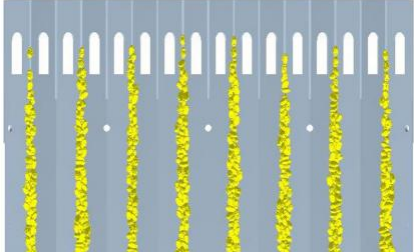
立式超深旋耕作业仿真
2023年,团队独立研制出适合我国蔗田的小型低阻立式超深旋耕机,作业深度40cm时,新型刀具单位幅宽作业阻力比五丰的减少18%,且还在持续优化。

立式超深旋耕机(2023,独立研发)

领导专家现场观摩立式超深旋耕机作业

国家媒体报道
(2)种植机械
依托广西自然科学基金项目支持,为降低甘蔗切割伤芽率,提高种植精准度,和不同芽种种植机械化技术或包衣机械化种植技术服务,完成了广西主要的三种不同糖料蔗的茎节图像采集,建立甘蔗-输送装置-切割器-摄像头位置关系模型,提出甘蔗茎节图像的特征与识别茎节的标准特征判断运算方法,采用Radon函数提取甘蔗茎节边缘直线,得到甘蔗茎节在图片上的直线像素位置的分布规律。
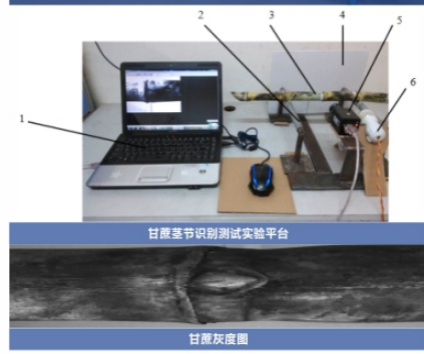
甘蔗切种茎节识别
针对目前种植机排种不均匀和伤芽率高的瓶颈问题,从2016年起,对种植机关键部件排种器进行了创新设计并创制了3代双芽蔗段排种器,可实现2.5根蔗段/秒,1-2根蔗段/次的高速匀量排种。





第一代排种器 第二代排种器 第三代排种器
(3)收获机械
从1998年起,依托国家自然科学基金和广西自然科学基金项目连续支持,针对甘蔗收获机切割质量较低和含杂率较高的问题,与广西农机研究院进行了长期合作研究,研究了切割器复杂作业机理和除杂机理,同时对甘蔗切割和除杂系统进行了优化。
甘蔗收获切割仿真
甘蔗除杂系统作业仿真
近年来,开展了分步式甘蔗收获成套装备研制,现已完成国家自然科学基金项目和广西基金项目2项,在研广西重点研发计划项目1项。成果应用于拉力式甘蔗剥叶机的研发,计划2024—2025榨季在柳州建立10个应用示范基地。

分步式甘蔗除杂装置
2、仿生智能挖拔式木薯收获机
2009年以来,依托国家基金项目、广西科技重大专项(东盟国际合作项目)和广西科技厅重点实验室项目支持,以广西有代表性的木薯生长状况为对象,围绕丘陵地区木薯仿生收获机械设计理论,开创性开展了一系列的研究工作,发表论文24篇,SCI/EI收录14篇,获5项发明专利,并研制了4代收获机样机。形成了一种全新的木薯收获机械设计理论。

人收获拔起木薯(高速摄像)

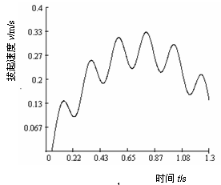
人拔起木薯速度



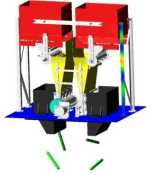
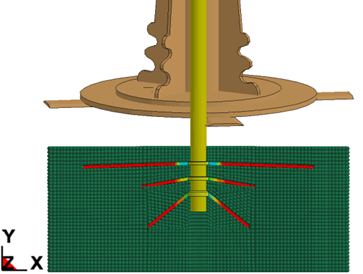
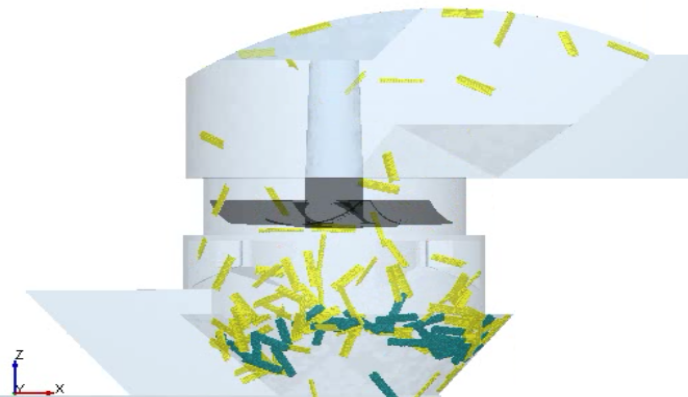
仿生拔起机构拔起木薯仿真

第4代仿生智能挖拔式收获机

走出国门:研发的木薯机械在东盟国家推广应用
3、电磁振动式水稻种植机械
针对水稻种植机械排种排秧不均匀和伤种高的问题,开展了一系列的电磁振动式水稻种植机械研究工作,研制出了水稻电磁振动环型播种机(1993年)(国际首创)、8行水稻电磁振动直播机(1998年)(全国农机学界知名,并在广西南部进行了一定面积的推广应用)、电磁振动水稻摆秧机(2000年)和电磁振动水稻田间拌浆育秧播种机(2013年)(国内领先)。

田间拌浆育秧播种机
电磁振动排种器排种仿真
近年主要研究成果:
1)杨望等.Simulation of forces acting on the cutter blade surfaces and root system of sugarcane using FEM and SPH coupled method[J].Computers and Electronics in Agriculture,2021.( SCI收录)
2)杨望等.Numerical simulation of spiral cutter-soil interaction in deep vertical rotary tillage[J].Agriculture,2023.( SCI收录)
3)杨望等.Embedded field stalk detection algorithm for digging–pulling cassava harvester intelligent clamping and pulling device[J].Agriculture,2023.( SCI收录)
4)杨望等.Effect of root-soil parameters on the lodging resistance of sugarcane(Saccharum officinarum L.)[J].Applied Ecology and Environmental Research,2020.( SCI收录)
5)杨望等.Numerical simulation of an experienced farmer lifting tubers of cassava for designing a bionic harvester[J]. CMES-computer modeling in engineering & sciences,2015.(SCI收录)
6)杨望等.Optimized tuber-lifting velocity model (TLVM) for cassava harvester design[J].Advances in Mechanical Engineering,2018.(SCI收录)
7)黄亦其等. Evaluating Data Augmentation Effects on the Recognition of Sugarcane Leaf Spot[J].Agriculture,2023.( SCI收录)
8)黄亦其等. Rresearch on sugarcane seed-bud location based on anisotropic scaling transformation[J]. Applied engineering in agriculture,2022.( SCI收录)
9)黄亦其等. Hyperspectral Imaging for Identification of an Invasive Plant Mikania micrantha Kunth[J]. Frontiers in plant science,2021.( SCI收录)
10)黄亦其等. UAV and a deep convolutional neural network for monitoring invasive alien[J]. Computers and electronics in agriculture,2020.( SCI收录)
11)陆志恒等. UAV and a deep convolutional neural network for monitoring invasive alien[J]. Computers and electronics in agriculture,2020.( SCI收录)
12)陆志恒等. Automatic teat detection for rotary milking system based on deep learning algorithms[J]. Computers and electronics in agriculture,2021.( SCI收录)
13)张彪等. Design andexperiment ofprofilingfurrow-ridgeterrain bycaneleaf-chopping andreturningmachine[J]. Agriculture,2024.( SCI收录)
14)张彪等. A DEM-MBD based method for regulating transfer flux in the supply and discharge of cane seed particles[J].Computers and electronics in agriculture,2024.( SCI收录)
15)黄亦其等.基于光谱分析的甘蔗叶片早期轮斑病与锈病识别[J].农业机械学报,2023.(EI收录)
16)黄亦其等. Gradient-based method for the identification of multi-nodes in sugarcane[J]. Information Processing in Agriculture,2020.( EI收录)
17)杨望等.种植于红粘土的木薯块根挖掘作业数值模拟[J].机械工程学报,2013.(EI收录)
18)杨望等.基于改进蜘蛛群集算法的木薯收获机块根拔起速度优化[J].农业工程学报,2018.(EI收录)
19)杨望等.木薯收获机土薯抖动分离装置性能仿真及试验[J].农业工程学报,2017.(EI收录)
20)杨望等.木薯块根拔起力的力学模型和数学模型分析[J].农业工程学报,2011.(EI收录)
21)杨望等.入土切割对甘蔗切割过程影响的仿真试验[J].农业工程学报,2011.(EI收录)
22)黄亦其等.基于Bayes决策的甘蔗种芽完好性检测与试验[J].农业工程学报,2016.(EI收录)
23)黄亦其等.基于感应计数的甘蔗种切割防伤芽系统的设计与试验[J].农业工程学报,2015.(EI收录)
24)杨坚等.电磁振动式拌浆育秧水稻芽种播种机优化试验[J].农业工程学报,2012. (EI收录)
科研项目:
1)国家自然科学基金项目:蔗蔸田超深旋耕部件作业机理及优化研究,2022-2025.
2)国家自然科学基金联合重点项目:面向复杂丘陵地貌的小型化甘蔗收获机自主作业与协同优化控制研究,2024-2027.
3)国家自然科学基金项目:面向甘蔗植物学特征多样性的仿生剥叶方法及其机理研究,2020-2023.
4)国家自然科学基金项目:基于数值模拟的甘蔗倒伏动力学机理研究及影响因素综合优化,2016-2019.
5)国家自然科学基金项目:木薯收获机械多元耦合仿生块根拔起系统设计方法,2014-2017.
6)国家自然科学基金项目:丘陵地区木薯块根收获机械基础理论与设计方法,2011-2014.
7)广西科技重大专项(国际合作项目):木薯生产全程机械化技术在老挝转移示范,2023-2026.
8)广西重点研发项目:智慧农机动力域控制系统关键技术开发及应用,2021-2023.
9)广西科技攻关项目:用于高速插秧的田间芽种精密播种机,2011-2013.
10)广西自然科学基金项目:双螺旋叶片粉垄工作部件的作业机理及优化研究,2023-2026.
11)广西自然科学基金项目:基于主动深度学习的切割甘蔗宿根破头损伤识别模型构建与智能监测,2021-2024.
12)广西自然科学基金项目:基于生物形态特征的甘蔗径向剥叶方法及其机理研究,2019-2021.
13)广西自然科学基金项目:蔗田粉垄机械关键作业部件作业机理及优化,2018-2021.
14)广西自然科学基金项目:双目视觉的甘蔗种植切割防伤芽视觉识别与定位系统研究,2014-2017.
15)广西自然科学基金项目:甘蔗倒伏力学机理及调控方法研究,2014-2017.
16)广西创新驱动发展专项:甘蔗农机农艺融合规模化生产技术示范,2017-2020.
17)广西科技基地和人才专项:中国荷斯坦奶牛乳头识别定位与自动套杯关键技术研究,2023-2026.


